





■ ロボティクス
バニシング加工のためのパラレルメカニズムの開発
|
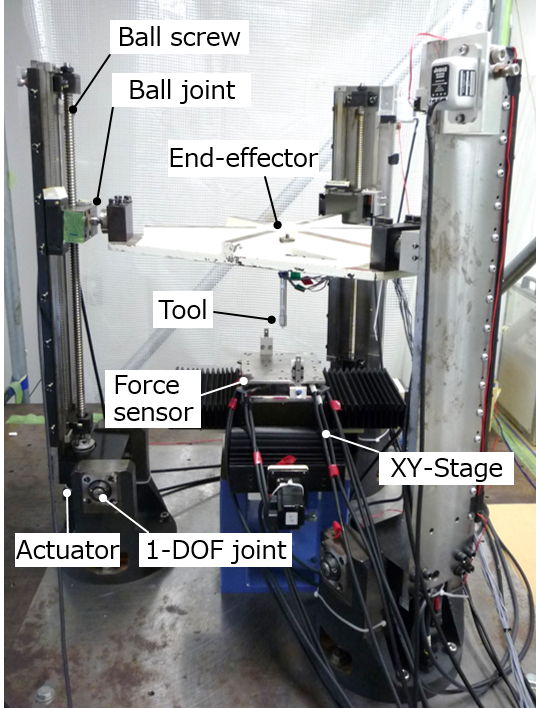
本研究では,高剛性な5自由度ハイブリッド‐パラレルメカニズムを用いて曲面への高精度なバニシング加工を実現しています.図に示す加工装置は,高剛性・高出力な特性を有する回転2自由度並進1自由度のパラレルメカニズムと並進2自由度のXYステージを組み合わせた構造となっています.
上部のパラレルメカニズムは,静止節(土台)と回転1自由度対偶で固定された3本の節によって,工具が固定された出力節を支持する構造です. 力センサを有する下部のXYステージに加工対象を設置し,上部のパラレルメカニズムと連動させて加工を行います. さらに,力センサを用い力制御を行うことにより,一定の力で押し付けながら設定した経路を位置制御する手法を提案しています. 他方,バニシング加工とは,金属材料の表面をダイヤモンドを使った高剛性な工具で擦り,金属表面の微細な凹凸を滑らかにする加工です.通常の研磨と異なり,スラッジと呼ばれる加工クズを生じることがなくクリーンな加工と言えます. 本装置をバニシング加工に応用することで,力制御により金属表面の凹凸に合わせて工具位置を微妙に制御しながら,高精度な加工が実現できます.また,パラレルメカニズムの高剛性な特性により工具が金属材料から押し返されず,設定された加工経路を精度よく動作可能です. 本研究は,金型など複雑な曲面を有する形状の金属表面へのバニシングに応用が期待できます. |
|
柔軟ばね関節を用いたパラレルメカニズムの開発
|
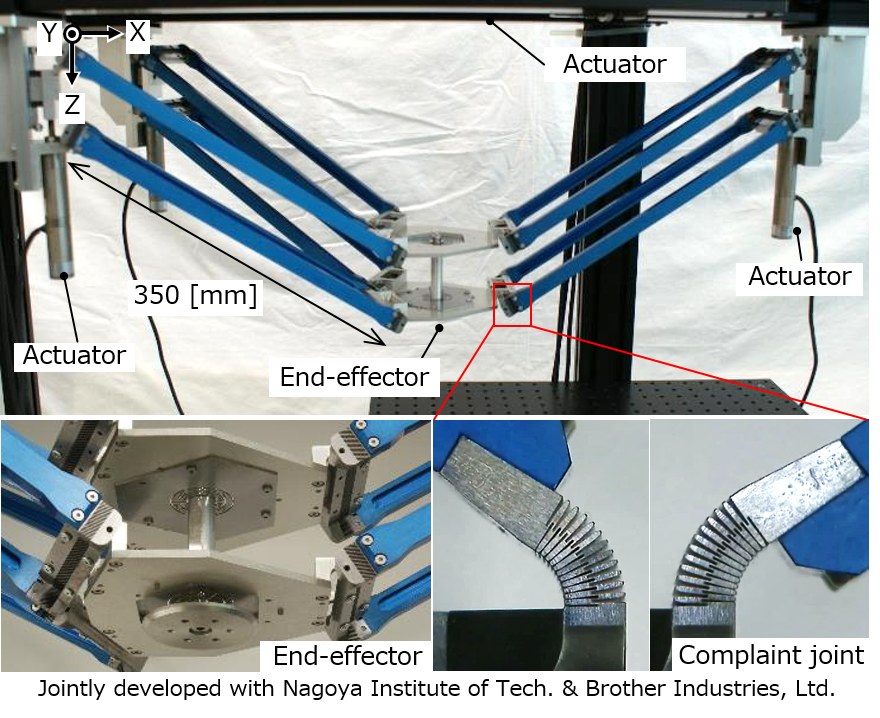
本研究は,ばねの弾性変形により意図的に構造を変形し動作させるパラレルメカニズムを提案しています.
ばねの弾性変形を利用するため,機構に機械的ガタがまったく発生せず高精度に動作する特徴を有します.
また,摩擦が生じないため,磨耗粉が発生せず潤滑の必要がないなどの利点があります.
これらの特徴を利用し,手術,医薬品および食品を扱うクリーンな環境や真空・宇宙など特殊な環境下にも応用可能です.
このようにばね関節を応用した機構として,従来からMEMS分野を中心としコンプライアントメカニズムと呼ばれる機構が開発されています. 高精度である一方で,微小な弾性変形を生じて動作するため,動作域が限られるなどの問題点を有していました. そこで本研究では,弾性域内で非常に広い範囲に屈曲するばね関節を提案し,図に示すような5自由度のパラレルメカニズムとして構築しました. 本装置は,1.0umの高い繰り返し精度と150×150×400mmの動作域を実現しています. |
|
身体機能測定用ワイヤパラレルメカニズムの研究
|
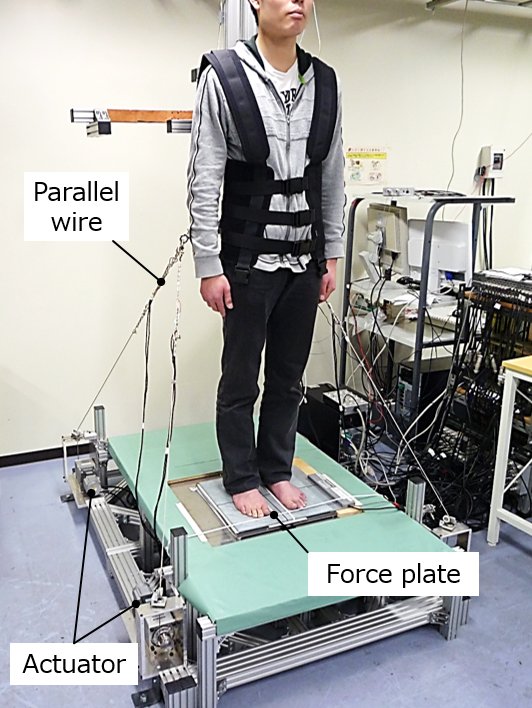
本研究の目的は,高齢者や障害者の身体能力の評価として,姿勢の調整および保持能力を評価する評価装置の開発である.
高齢者や障害者にとって,身体能力を測定し評価することは重要であり,この評価によって,転倒などの事故防止,
日常生活へ及ぼす支障の度合いの評価,また,支障の度合いに応じて,それぞれの人に適する処置を行うことが可能となる. 測定装置には,高剛性,多自由度,軽量,小型,柔軟性を有するワイヤパラレルメカニズムを利用している. 測定用のワイヤパラレル装置は,4個のモータで被験者の上体を支えるワイヤを巻き取り,それぞれのワイヤの長さを調節することで上体の位置制御を行う. 被験者の姿勢変化時に得られるワイヤの張力を測定することで姿勢の調整および保持能力の評価が可能となる. |
|
受動関節を用いたスキルアシストアームの研究
|
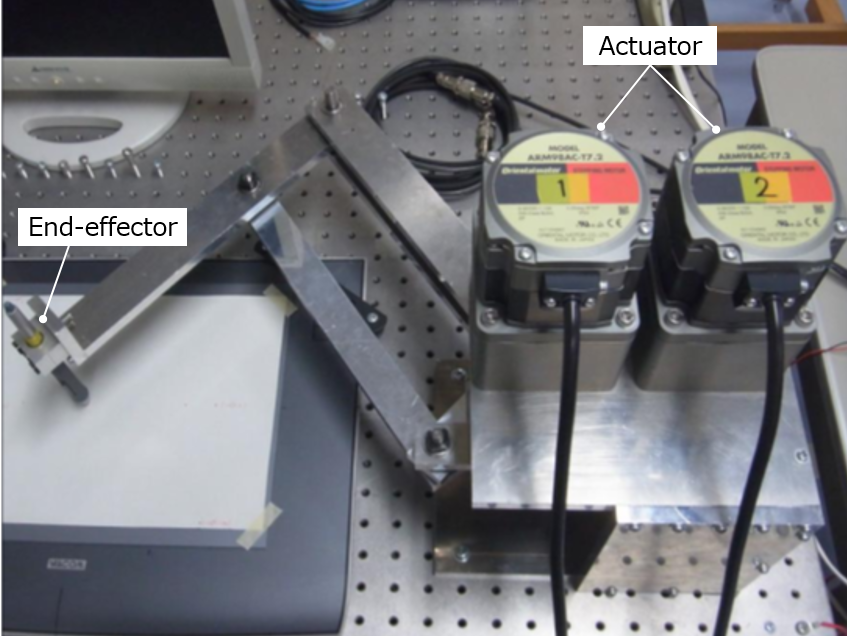
本研究では,人間の動作をアシスト・教示するために,受動関節を用いたロボットアームを開発しています.
一般的にロボットは,位置制御により自動的に高精度な動作を繰り返し行うことができますが,複雑な環境や対象では,センサや制御が複雑になり,さらに経験に基づいた多角的な判断が必要です. 一方人間は,多くの情報から必要なものだけを淘汰し,総合的に判断する能力を有します. ただ,これらを判断しながら,正確な作業を再現性高く行うには,多くの訓練と経験を必要とします. 例えば,手術手技や書道などです. そこで,本研究では,ロボットの正確な制御により高度な作業を補助しながらも人間の判断能力を活かす,スキルアシストの研究を行っています. 現在は,基礎的な作業として人間がペンを用いて図形を描く際の動作の補助を目標とし,図に示すようなスキルアシストアーム試作機を開発しました. これによりロボットによる人間へのスキルアシストの実現性を確認しました. |
|
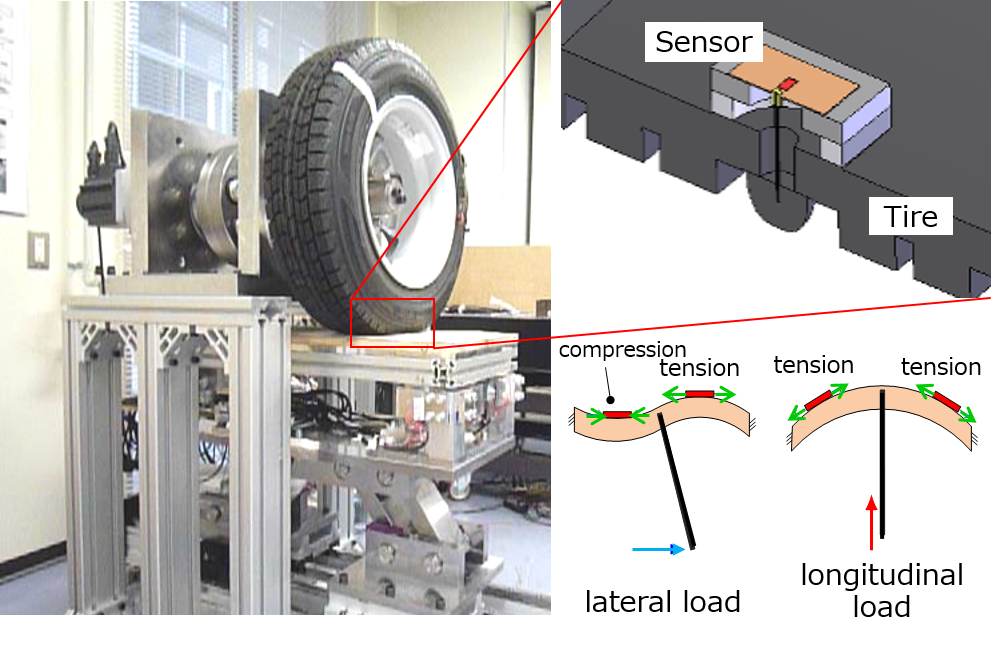
タイヤ用摩擦係数センサの研究
| 本研究では,車のタイヤと路面との摩擦係数を直接計測するセンサを開発しています.直接,摩擦係数を計測可能であるため,ABS(ブレーキ時のタイヤロック防止),TCS(加速時のタイヤ空転防止),ESC(横滑り防止)などの高度な車体コントロールシステムに応用可能です. |
|