研究背景
産業用ロボットマニピュレータによる高速な動作や高重量物の搬送は,停止時の残留振動や駆動トルクの増加を招き,位置決め精度や消費エネルギに影響を及ぼします.そこで,ロボットの位置・姿勢の時間にともなう変化,すなわち軌道を最適化することで,残留振動や駆動トルクを抑制する手法が提案されています.しかし,その多くはロボットの動力学モデル(いわゆる運動方程式)を構築して解析を行うことで軌道を最適化します.動力学モデルを構築するためには,ロボットの多数の諸元(リンク寸法,質量,慣性モーメント,関節の弾性係数,摩擦係数など)が必要となります.しかし,市販のロボットでこれらが未知であることが多く,正確なモデルの構築は困難です.そのため,市販のロボットに対して,このような軌道最適化手法を適用することは容易ではありません.
研究目的
そこで私たちは,発見的手法や機械学習を組み合わせ,ロボットを実際に稼働させたときの計測情報(関節トルクや振動など)を評価することで,軌道を最適化する手法を構築しています.これにより,動力学モデルを用いず,残留振動や駆動トルクが低減する最適な軌道をロボット自身が発見,学習することを目的としております.
◆発見的手法SHAによる軌道探索
発見的手法SHA(S. Lin’s Heuristic Algorithm)は,設定した評価値が最小となるように,複数の変数の最適な組み合わせの値を短時間で探索する発見的アルゴリズムです.ロボットの軌道は軌跡の長さや目標速度,加減速度などの複数の変数で表現されます.そのため,これらの変数の値が決定すると軌道が決定し,ロボットに生じる振動の大きさや駆動トルクも決定します.SHAによる軌道探索では,動作中のモータ電流や振動振幅などを評価値とし,軌道を表現する変数の一部の値を乱数で変更しながら軌道を更新していきます.これにより,残留振動や駆動トルクを抑制した最適軌道を,短い探索時間で自動的に生成することができます.
|
SHAによる軌道探索の様子 |
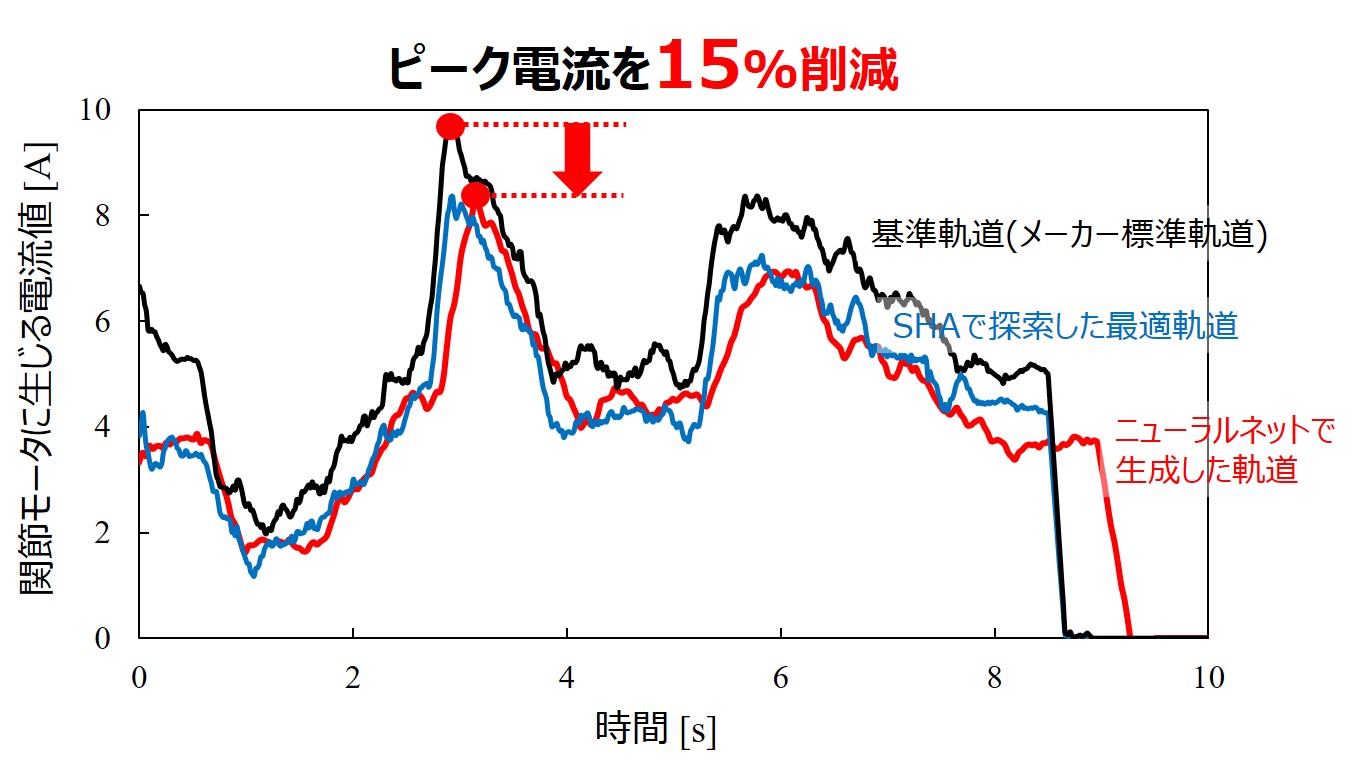
基準軌道(メーカー標準)と最適軌道との比較 |

◆ニューラルネットワークを用いた軌道学習
SHAを用いた軌道最適化手法では,ロボットの作業ごとに実機を動作させて軌道を探索する必要があるため,類似した作業に対しても軌道の探索を一からやり直さなければいけません.そこで,私たちはSHAの探索で得られた軌道の最適化結果を学習データとして,ニューラルネットワークを構築することで類似した新たな作業に対しても瞬時に最適な軌道を決定可能な手法を提案しております.これにより,様々な作業に対して軌道の最適化を効率よく行うことができます.本研究では,与えられた軌跡形状に対してロボットの動作開始位置(ロボットの設置位置)や加減速度を最適化することで,モータ電流(駆動トルクに相関)を低減できることを確認しております.