研究背景
人にとって手先を使った作業はとても重要です。しかし、事故などの後遺症によって身体動作が不自由になったり、加齢にともなってパーキンソン病にかかり、手先に振戦(振え)が生じたりすることがあります。これにより、食事などの手先を使った日常生活動作に支障が生じてしまいます 。
他方で、例えば手作業の切削加工では、切削位置を高精度に調整して動かすと同時に、切削にともなう抵抗力や工具の操作速度を調整するなど、位置調整と同時に別のことを行う高度な技術が要求されます。しかし、健常者においても、人は手先位置を把握し、それを正確に調整することがあまり得意ではありません。
そこでこのような状況において、高精度な位置決めが得意なロボットにより、人の動作を補助することが考られますが、ロボットが人のように適切な判断を行ったり、力の調整を行ったりするためには、様々なセンサや複雑な制御が必要です。
研究目的
以上のことから本研究では、動作において生じる力や動作速度の調整を、人が状況を判断して行い、同時に人の動きに合わせ協調して動作しながら、人の動作を正確に補助するアシストロボットを、いくつか提案し、開発しています。これにより、手先の高精度な動きを可能にし、手作業においても高精度な加工を可能にしたり、不自由な身体動作を日常的に補助したりすることを目的としています。
開発した身体アシストロボット
◆ スキルアシストアーム
卓上に設置し、空間内に設定した目標となる軌跡や面の上に手先位置を補助するロボットアームを開発しています。同アームの特徴は、外力によって自由に変位する受動関節を備えている点です。 一般的なロボットアームは高精度な動作のため、人がロボットに力を加えても、容易には変位しません。しかし、提案したロボットアームでは受動関節を有するため、人はロボットアームを容易に変位させることが可能になり、また、その変位を受動関節に設置したセンサにより検出することができます。この検出した変位をもとに、ロボットアームが目標軌跡との誤差を補正します。なお、モータのトルクを制限することで、受動関節としており、目標軌跡とアーム姿勢に応じ、受動関節状態のモータと位置を補正するためのモータを切り替えて動作させます。以上の方法によって、人が力や動作速度を自分の意志で調整しながら、ロボットアームがそれに協調して動作し、目標軌跡や面の上に、人の手先位置を補助できます。
 |
 |
|
Movie 1 直線軌跡動作補助 |
|
Movie 2 平面動作補助 |
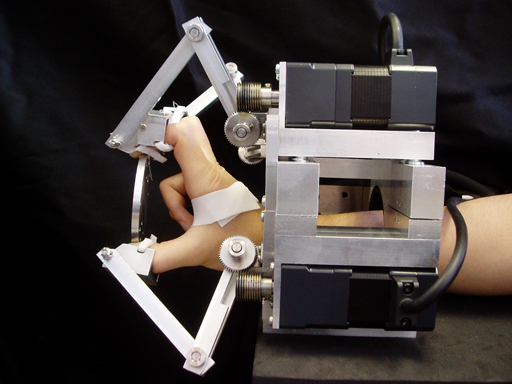
◆前腕装着式パラレルワイヤ駆動機構による動作補助
パラレルワイヤ駆動機構を人の前腕部に装着し、その動作を補助する装置を提案し、開発しています。同機構は、基部に設置したモータによりワイヤを牽引し伸縮させ、出力点を動作させます。同機構はワイヤを用いるため、柔軟で人への装着性が高く、多方向の動きを比較的簡易な構造で得やすい特徴があります。
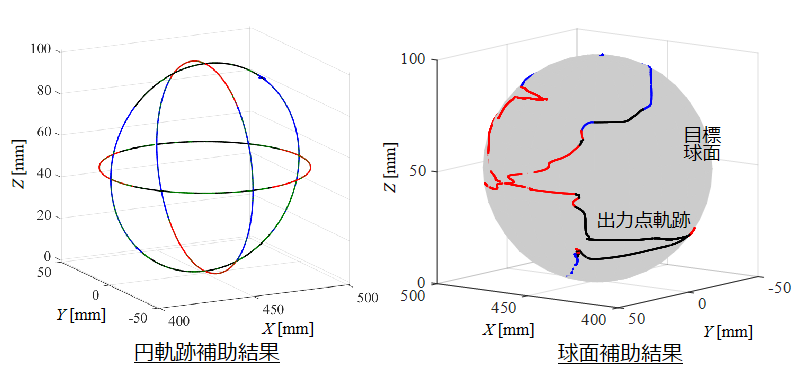
同機構において人の動作と協調して補助を行うため、人が機構へ動作を入力したときに機構が容易に変位可能な状態である受動状態を作り出すことが重要です。一方で、機構を正常に動作させるためには、ワイヤが弛まないよう常に張力を生じさせる必要があります。 以上のことから、開発した機構では、モータと同時に常に一定の引張力が生じるばねを用いてワイヤを牽引します。目標軌跡を設定のうえで、前腕が同軌跡と一致しているときは、モータのトルクを制限し、ばねのみでワイヤを牽引することで、人が前腕を自由に動作できます。人が前腕を動作させた結果、目標軌跡から誤差が生じた場合、モータを動作させワイヤを牽引し、目標軌跡上へ前腕位置を補正します。
 |
 |
|
Movie 1 円軌跡補助 |
Movie 2 正方形軌跡補助 |
◆随意動作補助
これまでの動作補助では、事前に目標軌跡を与えたうえで、動作補助を行っています。他方で、食事動作などにおいては、最終的に到達したい位置(例えば食器上の食べ物の位置)は常に変更されるため、既知の一定の目標軌跡を与える手法は応用しにくいです。そこで、動作中に人の動作したい意思である随意方向を推定し、その方向にそった目標軌跡を逐次設定し、動作を補助する手法を提案します。同手法では、常に人の動作速度と動作軌跡を測定および記録します。そのうえで、低速時は人が動作方向(随意方向)を選んでいると考えて、機構を受動状態にしたうえで、記録した動作軌跡から随意方向を推定し続けます。もし、高速に移動し始めたら、推定した随意方向に動作すると予測し、同方向に目標直線を設定し、モータを駆動して動作補助を行います。なお、再び低速になれば、受動状態に戻り、随意方向を推定します。

◆手先装着式動作アシストロボット
上記のロボットは手先位置の補助を行いますが、一方で、指先で把持した物体を高精度に補助するための、手に装着する形式のロボットも開発しています。同ロボットでは、ロボットの基部に設置した複数のモータと、ロボット先端の出力リンクを複数の剛体リンクで接続し、出力リンクを動作させるパラレルメカニズムを利用しています。同メカニズムの形状を利用することで、人の手指の動きを阻害しないよう、図のように手の外側にロボットを装着することが可能です。