本学の高度モビリティ研究所では、自動運転自動車の実現に向けて様々な研究を行っております。
本研究室では、路面摩擦係数を測定可能な「インテリジェントタイヤ」の研究に取り組んでおり、こちらのデモを行いました。このほかにも、小型工作機械の高精度化に関する研究、スキルアシストアームの研究紹介を行いました。






本学の高度モビリティ研究所では、自動運転自動車の実現に向けて様々な研究を行っております。
本研究室では、路面摩擦係数を測定可能な「インテリジェントタイヤ」の研究に取り組んでおり、こちらのデモを行いました。このほかにも、小型工作機械の高精度化に関する研究、スキルアシストアームの研究紹介を行いました。
金沢大学の広報誌 Acanthus 53号(p.9)に、本研究室が紹介されました!
ここでは主に、研究内容の1つである「インテリジェントタイヤ」について紹介されています。

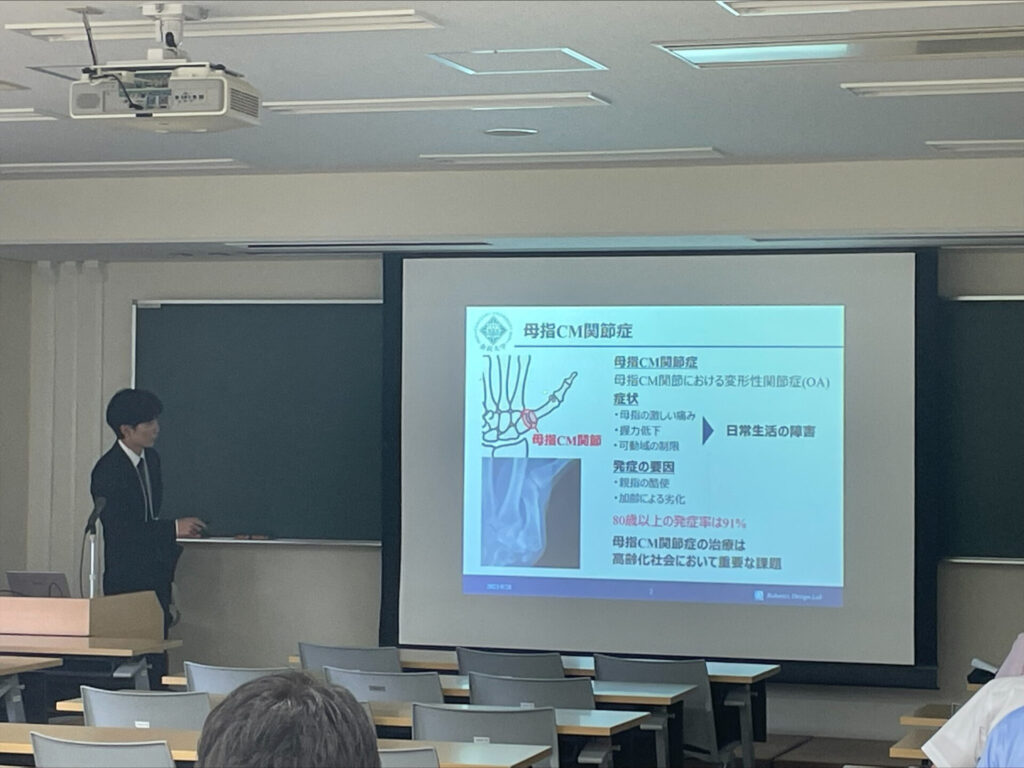
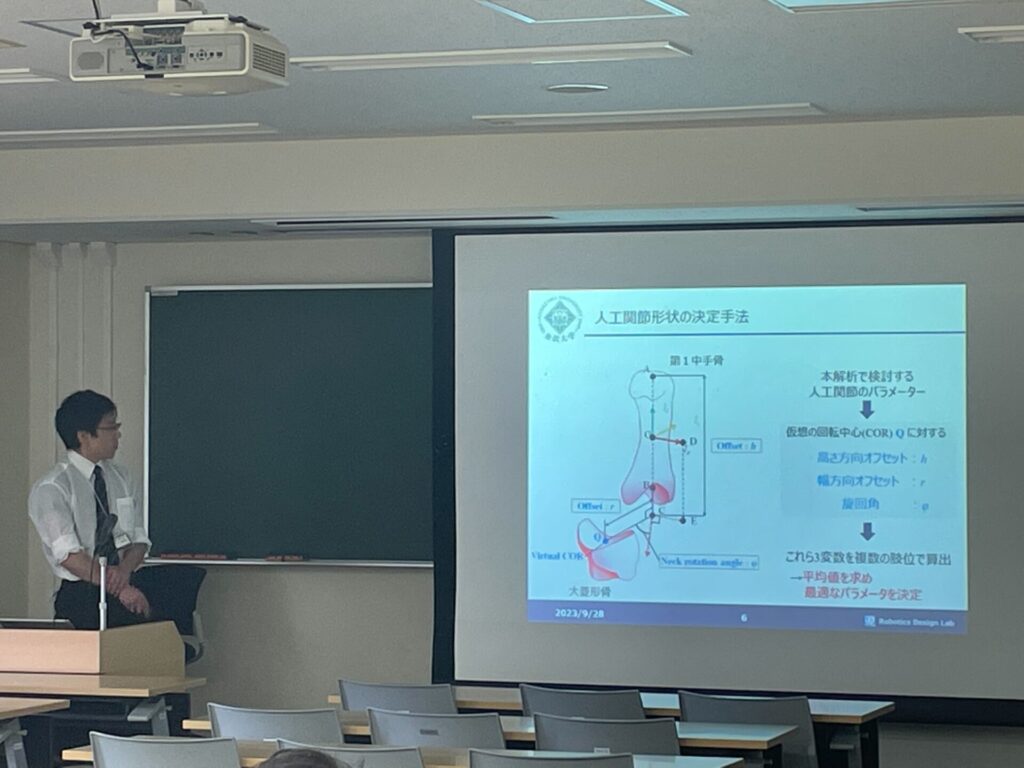
本研究室の学生2名がに日本機械学会 M&M2023 材料力学カンファレンスに参加しました!
大会は 9/27(水)~9/29(金) の3日間、筑波大学(筑波キャンパス)で開催されました。
↓↓↓ 発表した学生の名前と発表題目です ↓↓↓
本研究室の学生2名が日本機械学会2023年度大会に参加しました!
大会は 9/3(日)~9/6(水) の3日間、東京都立大学(南大沢キャンパス)で開催されました。
↓↓↓ 発表した学生の名前と発表題目です ↓↓↓


本研究室の学生3名が精密工学会秋季大会に参加しました!
大会は 9/13(水)~9/15(金) の3日間、福岡工業大学で開催されました。
↓↓↓ 発表した学生の名前と発表題目です ↓↓↓

2023年8月7日
金沢市桜丘高校の生徒13名(+先生2名)に、本研究室(ロボティクス・デザイン研究室)の見学会を開催しました。
本研究室の学生から、研究に関する説明や実機を用いたデモを行いました。その後は、学生同士(本研究室学生と桜丘高校生)で交流を行い、大学生生活・研究生活などについて自由に話し合いました。




本研究室から2名の学生が、自動車技術会 春季大会ポスターセッションに参加しました。

以下の学生が学業の成果を認められて表彰を受けました!
■玉井敦也(M2 既卒);三浦賞
■池神那京(B4);金沢工業会賞
おめでとうございます!
金沢大学 材料力学講座、強度設計研究室、機械機能設計研究室
同窓生の皆様
前略
前略
春暖の候、日常生活が戻りつつある中、同窓生の皆様におかれましては益々ご健勝のこととお慶び申し上げます。
皆様には、常日頃から同窓会活動にご協力、ご支援を賜りまして心よりお礼申し上げます。さて、将来にわたって同窓会を円滑に運営できますよう、年に一度、同窓の皆様のご連絡先を更新させていただいております。ご連絡先の変更の有無にかかわらず、下記の要領により4月末日までに更新登録していただきますようお願い申し上げます。
なお、可能な範囲で構いませんので、本案内につきまして同期の方々と情報共有いただけますと幸甚でございます。
草々
令和5年3月吉日
同窓会幹事 立矢 宏、樋口 理宏、鈴木陽介、小塚 裕明、吉田 博一

2022年12月14日(水)〜16日(金)に幕張メッセで開催された計測自動制御学会システムインテグレーション部門講演会(SI2022)に本研究室から,鈴木陽介(助教),川辺空雅(M2),佐々木宥(M2),坂井響(M1),齋藤晃平(B4)の5名が参加しました!発表タイトルは以下のとおりです.
■釣糸人工筋肉の液中での駆動特性の調査
○川辺 空雅、鈴木 陽介、西村 斉寛、辻 徳生、渡辺 哲陽
■近接覚センシングに基づく 3 次元形状再構成
○佐々木 宥、鈴木 陽介、西村 斉寛、辻 徳生、渡辺 哲陽
■近接覚による非接触での物体との接触状態予測
○坂井 響、鈴木 陽介、辻 徳生、西村 斉寛、渡辺 哲陽
■シリコーンゴムの硬化阻害を利用したソフトロボット指の開発
○齋藤晃平,鈴木陽介