「研究室全体説明動画」はこちら
「卒業プロジェクトに関するFAQ」はこちら
研究詳細
以下のような研究プロジェクトの中で,ロボティクス, 計測・制御, CAEによる非線形解析, ソフトマテリアルなどの非線形材料の扱い, 機械設計などを高度に学んでいきます
また,MATLAB・Simulink,ANSYS,LabVIEW,SOLIDWORKSといった企業で多く導入されているソフトを扱います
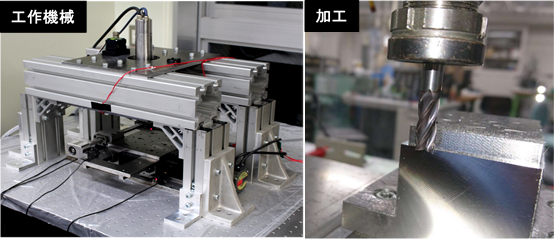
- 機械学習を用いたデスクトップファブリッシング用小形工作機械の高精度化
- インテリジェントタイヤによる先進運転支援システムの開発[高度モビリティ研究所 先進車両技術部門]
- タイヤ接地面の摩擦挙動の解明とμ-sモデルの確立
- 身体への装着が容易な高機能プロテクターの開発
- 医工学-CAE・運動解析による医療の高度化-
- インテリジェントロボットハンドの研究
- ヒトの動作を補助および測定可能なウェアラブルロボットの研究
- 発見と学習を用いたロボットマニピュレータの動作最適化
| 研究テーマ | 担当学生 | 指導教員 |
|
M2 元木 達也 |
立矢 宏 研究員: 上野祐亮(小松大) |
|
| インテリジェントタイヤによる 先進運転支援システムの開発 [高度モビリティ研究所 先進車両技術部門]  |
M2 前野 圭佑 |
立矢 宏 樋口理宏 鈴木陽介 |
|
|
M2戸澤 景 |
立矢 宏 研究員: 上野祐亮(小松大) |
| 抽出法による軽量エポキシフォームの開発と 保護具への応用|高速材料試験機の開発  |
M2 諌山 迅 |
樋口理宏 |
| 医工学 -CAE・運動解析による医療の高度化- 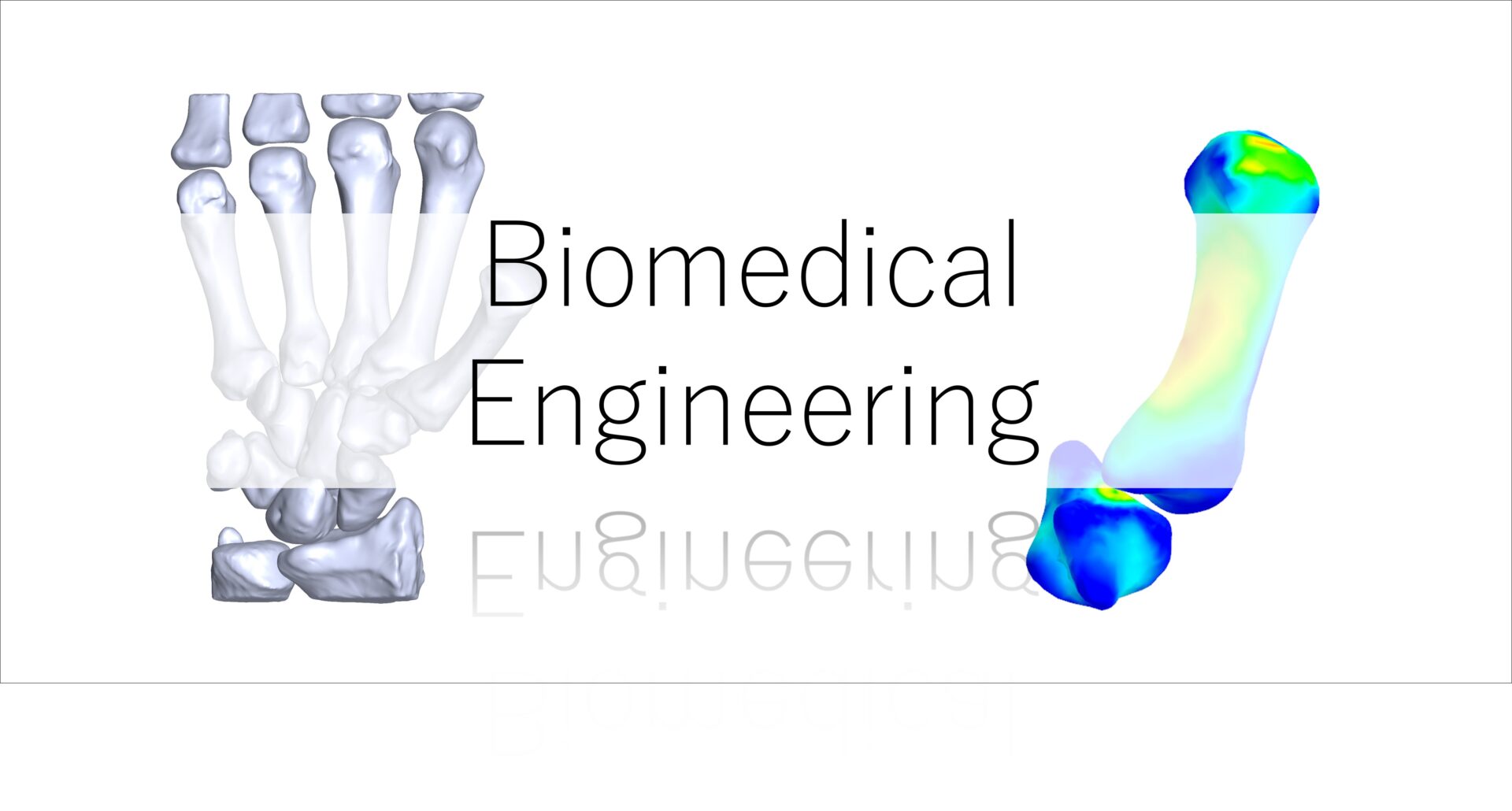 |
D2 巽和真 |
樋口理宏 |
| 建設機械知能化のための研究 |
M2 張 奥瑞 |
立矢 宏 |
| 触覚・近接覚センサに基づく ロボットマニピュレーションの研究  |
M2 伊藤 崇良 |
鈴木陽介 |
|
B4 鎌谷 脩平 |
鈴木陽介 | |
| 人の空間動作を補助する スキルアシストアームの開発  |
M1 法林 峻平 |
小塚裕明 立矢 宏 |
| 人の空間動作を測定可能な ウェアラブル装置の開発 |
M2 髙橋 優 |
小塚裕明 立矢 宏 |
|
アーム搭載形移動ロボットの研究 (企業との共同研究のため非公開) |
M2 髙橋 優太 |
小塚裕明 立矢 宏 |